Содержание
Наибольшее распространение в источниках питания для бытовой аппаратуры получили импульсные блоки питания с импульсным трансформатором, в которых силовой ключ работает на постоянной частоте повторения импульсов, а длительность самих импульсов изменяется под действием формирователя широтно-импульсной модуляции ШИМ (ШИМ, англ. pulse-width modulation (PWM)).
Определение : широтно-импульсная модуляция — процесс управления мощностью, подводимой к нагрузке, путем изменения скважности импульсов, при постоянной частоте.
Принцип работы импульсных блоков питания на основе широто-импульсной модуляции
Формирование ШИМ осуществляется с помощью порогового элемента ПЭ, на один вход которого подается пилообразное напряжение Uпил а на второй — медленно изменяющееся напряжение Uизм, пропорциональное значению выходного напряжения лока питания Uвых. Изменение наклона пилы или уровня напряжения Uизм приводит к изменению момента срабатывания ПЭ, а значит, и длительности импульсов tо на выходе ключа К (рис. 1). Отметим, что пилообразное напряжение может сниматься как с выхода специального генератора, так и с низкоомного резистора, включенного последовательно с силовым ключом К (во время замкнутого состояния ключа ток, проходящий по нему и по соответствующей обмотке импульсного трансформатора, близок по форме к пилообразному).
В схему управления обычно входят задающий генератор (чаще всего, RC-типа или блокинг-гене-ратор), широтно-импульсный модулятор (ШИМ), цепи запуска, стабилизации (цепи обратных связей) и защиты. Весьма часто, для уменьшения помех на изображении, работу задающего генератора синхронизируют со строчной разверткой, для чего на схему управления поступают строчные импульсы обратного хода (СИОХ).

Рис. 2. Структурная схема импульсного стабилизатора телевизора с ШИМ.
Напряжение с выпрямителя Uвх подается на ключ К, соединенный последовательно с первичной обмоткой импульсного автотрансформатора L1 и эталонным резистором R24. Ключ К открывается в моменты прихода на него импульсов с усилителя У, длительность которых определяет значения напряжений на выходах вторичных выпрямителей В1 и В2. С выхода выпрямителя В2 через измерительную схему ИС напряжение поступает на один – из входов СС; на другой ее вход подается напряжение с источника опорного напряжения (ИОН).
Выходное напряжение ошибки с СС управляет проводимостью генератора тока ГТ, которая определяет длительность импульсов на выходе схемы ШИМ. Период следования импульсов с генератора Г, поступающих на формирователь ШИМ, соответствует периоду следования импульсов строчной развертки телевизора, так как синхронизируется ими по входу «Синхр».
Формирователь Ф улучшает форму прямоугольных импульсов. При возрастании падения напряжения на R24 срабатывает схема защиты СЗ и запрещает проход импульсов на ключ К. При включении телевизора стабилизатор запускается броском тока через резистор R14; в стационарном режиме стабилизатор питается от схемы самоподпитки С.
Схема импульсного блока питания предъявляет высокие требования к значениям предельно допустимых электрических параметров транзистора, используемого в ключевом каскаде. В течение времени tо (рис. 1), когда транзистор открыт, по обмотке импульсного трансформатора протекает пилообразно возрастающий ток. При чрезмерно "широком" отпирающем импульсе ("пила" слишком долго нарастает) или при коротком замыкании на выходе блока питания ("пила" имеет слишком большую крутизну) транзистор может выйти из строя. С другой стороны, при протекании тока происходит накопление энергии в магнитном поле трансформатора, а при закрывании транзистора возникает ЭДС самоиндукции е, значение которой зависит от питающего каскад напряжения Еп, времени открытого tо и закрытого tз состояния транзистора: е = Eпtо/tз.
Максимальное напряжение, прикладываемое к коллектору транзистора, Uк = Еп (1 + tо/tз.) может оказаться значительным (например, при tо = tз Uк=2Eп). Таким образом, эффективным средством защиты транзистора ключевого каскада от пробоя и от перегрузки по току является соответствующая регулировка соотношения tо/tз с помощью схемы широтно-импульсной модуляции ШИМ. Кроме того, для защиты выходного транзистора от пробоя к его коллектору подключают демпфирующие цепочки, составленные из резисторов, конденсаторов, диодов; между базой и эмиттером включают низкоомный резистор. Для демпфирования паразитных колебаний применяется специальная рекуперационная обмотка импульсного трансформатора с подключенным к ней выпрямителем.
Для уменьшения наводок от импульсного блока питания диоды выпрямителей шунтируются конденсаторами небольшой емкости; в цепи сглаживающих фильтров включают дроссели, роль которых нередко выполняет кусочек проволоки, продетой в ферритовую трубку; большое внимание уделяется экранированию и заземлению.
С целью получения дополнительных номиналов стабильного выходного напряжения в состав импульсных блоков питания нередко входит маломощный линейный стабилизатор, подключаемый к выходу одного из вторичных выпрямителей. В бестрансформаторных импульсных блоках питания сетевое напряжение подается на выпрямитель через специальный резистор, ограничивающий бросок тока в момент включения телевизора. Специфической особенностью блоков питания, применяемых в цветных телевизорах, является наличие в некоторых из них схемы размагничивания маски и бандажа кинескопа.
Смотрите также материалы, где рассматриваются основные принципы работы импульсных блоков питания на основе широто-импульсной модуляции:
Импульсные блоки питания структурная схема, принципы работы
Трансформаторные преобразователи с задающими генераторами
Онлайн справочник по микросхемам для импульсных блоков питания
Самый простой способ найти нужную документацию на микросхему для блоков питания, их цоколевку, типовую схему включения – воспользоваться быстропоиском в конце страницы или пролистать справочник и ознакомиться с его содержанием.
Раньше для питания устройств использовали схему с понижающим (или повышающим, или многообмоточным) трансформатором, диодным мостом, фильтром для сглаживания пульсаций. Для стабилизации использовались линейные схемы на параметрических или интегральных стабилизаторах. Главным недостатком был низкий КПД и большой вес и габариты мощных блоков питания.
Во всех современных бытовых электроприборах используются импульсные блоки питания (ИБП, ИИП – одно и то же). В большинстве таких блоков питания в качестве основного управляющего элемента используют ШИМ-контроллер. В этой статье мы рассмотрим его устройство и назначение.
Определение и основные преимущества
ШИМ-контроллер – это устройство, которое содержит в себе ряд схемотехнических решений для управления силовыми ключами. При этом управление происходит на основании информации полученной по цепям обратной связи по току или напряжению – это нужно для стабилизации выходных параметров.
Иногда, ШИМ-контроллерами называются генераторы ШИМ-импульсов, но в них нет возможности подключить цепи обратной связи, и они подходят скорее для регуляторов напряжения, чем для обеспечения стабильного питания приборов. Однако в литературе и интернет-порталах часто можно встретить названия типа «ШИМ-контроллер, на NE555» или «… на ардуино» – это не совсем верно по вышеуказанным причинам, они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
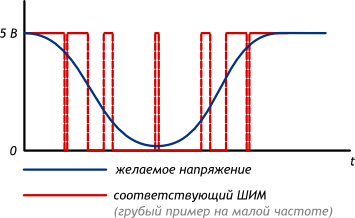
Аббревиатура «ШИМ» расшифровывается, как широтно-импульсная модуляция – это один из методов модуляции сигнала не за счёт величины выходного напряжения, а именно за счёт изменения ширины импульсов. В результате формируется моделируемый сигнал за счёт интегрирования импульсов с помощью C- или LC-цепей, другими словами – за счёт сглаживания.
Вывод: ШИМ-контроллер – устройство, которое управляет ШИМ-сигналом.
Основные характеристики
Для ШИМ-сигнала можно выделить две основных характеристики:
1. Частота импульсов – от этого зависит рабочая частота преобразователя. Типовыми являются частоты выше 20 кГц, фактически 40-100 кГц.
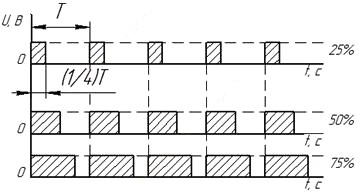
2. Коэффициент заполнения и скважность. Это две смежных величины характеризующие одно и то же. Коэффициент заполнения может обозначаться буквой S, а скважность D.
где T – это период сигнала,
Коэффициент заполнения – часть времени от периода, когда на выходе контроллера формируется управляющий сигнал, всегда меньше 1. Скважность всегда больше 1. При частоте 100 кГц период сигнала равен 10 мкс, а ключ открыт в течении 2.5 мкс, то коэффициент заполнения – 0.25, в процентах – 25%, а скважность равна 4.
Также важно учитывать внутреннюю конструкцию и предназначение по количеству управляемых ключей.
Отличия от линейных схем потери
Как уже было сказано, преимуществом перед линейными схемами у импульсных источников питания является высокий КПД (больше 80, а в настоящее время и 90%). Это обусловлено следующим:
Допустим сглаженное напряжение после диодного моста равно 15В, ток нагрузки 1А. Вам нужно получить стабилизированное питание напряжением 12В. Фактически линейный стабилизатор представляет собой сопротивление, которое изменяет свою величину в зависимости от величины входного напряжения для получения номинального выходного – с небольшими отклонениями (доли вольт) при изменениях входного (единицы и десятки вольт).
На резисторах, как известно, при протекании через них электрического тока выделяется тепловая энергия. На линейных стабилизаторах происходит такой же процесс. Выделенная мощность будет равна:
Так как в рассмотренном примере ток нагрузки 1А, входное напряжение 15В, а выходное – 12В, то рассчитаем потери и КПД линейного стабилизатора (КРЕНка или типа L7812):
Pпотерь=(15В-12В)*1А = 3В*1А = 3Вт
Тогда КПД равен:
Если же входное напряжение вырастит до 20В, например, то КПД снизится:
Основной особенностью ШИМ является то, что силовой элемент, пусть это будет MOSFET, либо открыт полностью, либо полностью закрыт и ток через него не протекает. Поэтому потери КПД обусловлены только потерями проводимости
И потерями переключения. Это тема для отдельной статьи, поэтому не будем останавливаться на этом вопросе. Также потери блока питания возникают в выпрямительных диодах (входных и выходных, если блок питания сетевой), а также на проводниках, пассивных элементах фильтра и прочем.
Общая структура
Рассмотрим общую структуру абстрактного ШИМ-контроллер. Я употребил слово "абстрактного" потому что, в общем, все они похожи, но их функционал все же может отличаться в определенных пределах, соответственно будет отличаться структура и выводы.
Внутри ШИМ-контроллера, как и в любой другой ИМС находится полупроводниковый кристалл, на котором расположена сложная схема. В состав контроллера входят следующие функциональные узлы:
1. Генератор импульсов.
2. Источник опорного напряжения. (ИОН)
3. Цепи для обработки сигнала обратной связи (ОС): усилитель ошибки, компаратор.
4. Генератор импульсов управляет встроенными транзисторами, которые предназначены для управления силовым ключом или ключами.
Количество силовых ключей, которыми может управлять ШИМ-контроллер, зависит от его предназначения. Простейшие обратноходовые преобразователи в своей схеме содержат 1 силовой ключ, полумостовые схемы (push-pull) – 2 ключа, мостовые – 4.
От типа ключа также зависит выбор ШИМ-контроллера. Для управления биполярным транзистором основным требованием является, чтобы выходной ток управления ШИМ-контроллера не был ниже, чем ток транзистора деленный на H21э, чтобы его включать и отключать достаточно просто подавать импульсы на базу. В этом случае подойдет большинство контроллеров.
В случае управления ключами с изолированным затвором (MOSFET, IGBT) есть определенные нюансы. Для быстрого отключения нужно разрядить емкость затвора. Для этого выходную цепь затвора выполняют из двух ключей – один из них соединен с источником питания с выводом ИМС и управляет затвором (включает транзистор), а второй установлен между выходом и землей, когда нужно отключить силовой транзистор – первый ключ закрывается, второй открывается, замыкая затвор на землю и разряжает его.
В некоторых ШИМ-контроллрах для маломощных блоков питания (до 50 Вт) силовые ключи встроенные и внешние не используются. Пример – 5l0830R
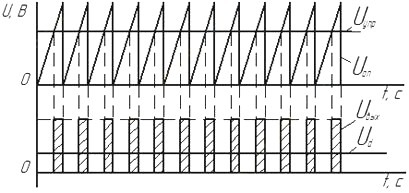
Если говорить обобщенно, то ШИМ-контроллер можно представить в виде компаратора, на один вход которого подан сигнал с цепи обратной связи (ОС), а на второй вход пилообразный изменяющийся сигнал. Когда пилообразный сигнал достигает и превышает по величине сигнал ОС, то на выходе компаратора возникает импульс.
При изменениях сигналов на входах ширина импульсов меняется. Допустим, что вы подключили мощный потребитель к блоку питания, и на его выходе напряжение просело, тогда напряжение ОС также упадет. Тогда в большей части периода будет наблюдаться превышение пилообразного сигнала над сигналом ОС, и ширина импульсов увеличится. Всё вышесказанное в определенной мере отражено на графиках.
Рабочая частота генератора устанавливается с помощью частотозадающей RC-цепи.
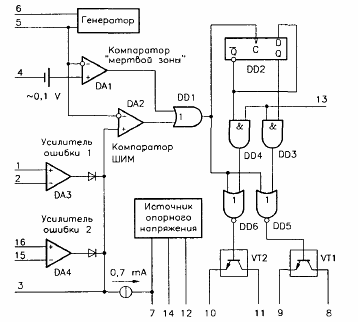
Функциональная схема ШИМ-контроллера на примере TL494, мы рассмотрим его позже подробнее. Назначение выводов и отдельных узлов описано в следующем подзаголовке.
Назначение выводов
ШИМ-контроллеры выпускаются в различных корпусах. Выводов у них может быть от трех до 16 и более. Соответственно от количества выводов, а вернее их назначения зависит гибкость использования контроллера. Например, в популярной микросхеме UC3843 – чаще всего 8 выводов, а в еще более культовой – TL494 – 16 или 24.
Поэтому рассмотрим типовые названия выводов и их назначение:
GND – общий вывод соединяется с минусом схемы или с землей.
Uc (Vc) – питание микросхемы.
Ucc (Vss, Vcc) – Вывод для контроля питания. Если питание проседает, то возникает вероятность того, что силовые ключи не будут полностью открываться, а из-за этого начнут греться и сгорят. Вывод нужен чтобы отключить контроллер в подобной ситуации.
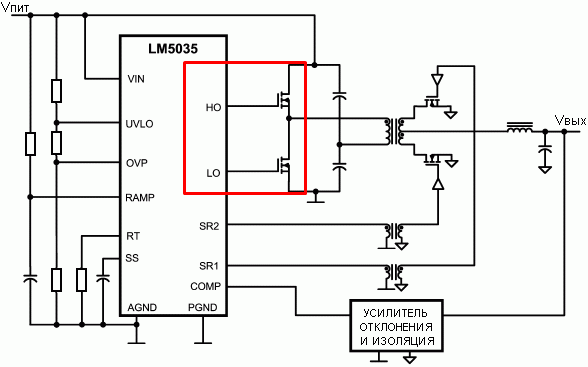
OUT – как видно из название – это выход контроллера. Здесь выводятся управляющий ШИМ-сигнал для силовых ключей. Выше мы упомянули, что в преобразователях разных топологий имеют разное количество ключей. Название вывода может отличаться в зависимости от этого. Например, в контроллерах для полумостовых схем он может называться HO и LO для верхнего и нижнего ключа соответственно. При этом и выход может быть однотактный и двухтактный (с одним ключем и двумя) – для управления полевыми транзисторами (пояснение см. выше). Но и сам контроллер может быть для однотактной и двухтактной схемы – с одним и двумя выходными выводами соответственно. Это важно.
Vref – опорное напряжения, обычно соединяется с землей через небольшой конденсатор (единицы микрофарад).
ILIM – сигнал с датчика тока. Нужен для ограничения выходного тока. Соединяется с цепями обратной связи.
ILIMREF – на ней устанавливается напряжение срабатывания ножки ILIM
SS – формируется сигнал для мягкого старта контроллера. Предназначен для плавного выхода на номинальный режим. Между ней и общим проводом для обеспечения плавного пуска устанавливают конденсатор.
RtCt – выводы для подключения времязадающей RC-цепи, которая определяет частоту ШИМ-сигнала.
CLOCK – тактовые импульсы для синхронизации нескольких ШИМ-контроллеров между собой тогда RC-цепь подключается только к ведущему контроллеру, а RT ведомых с Vref, CT ведомых соединяюся с общим.
RAMP – это ввод сравнения. На него подают пилообразное напряжение, например с вывода Ct, Когда оно превышает значение напряжение на выходе усиления ошибки, то на OUT появляется отключающий импульс – основа для ШИМ-регулирования.
INV и NONINV – это инвертирующий и неинвертирующий входы компаратора, на котором построен усилитель ошибки. Простыми словами: чем больше напряжении на INV – тем длинее выходные импульсы и наоборот. К нему подключается сигнал с делителя напряжения в цепи обратной связи с выхода. Тогда неинвертирующий вход NONINV подключают к общему проводу – GND.
EAOUT или Error Amplifier Output рус. Выход усилителя ошибки. Не смотря на то, что есть входы усилителя ошибки и с их помощью, в принципе можно регулировать выходные параметры, но контроллер довольно медленно на это реагирует. В результате медленной реакции может возникнуть возбуждение схемы, и она выйдет из строя. Поэтому с этого вывода через частотозависимые цепи подают сигналы на INV. Это еще называется частотной коррекцией усилителя ошибки.
Примеры реальных устройств
Для закрепления информации давайте рассмотрим несколько примеров типовых ШИМ-контроллеров и их схем включения. Мы будем делать это на примере двух микросхем:
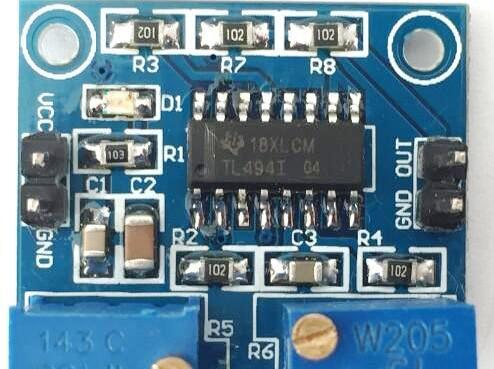
TL494 (её аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Они активно используются в блоках питания для компьютеров. Кстати, эти блоки питания обладают немалой мощностью (100 Вт и больше по 12В шине). Часто используются в качестве донора для переделки под лабораторный блок питания или универсальное мощное зарядное устройство, например для автомобильных аккумуляторов.
TL494 – обзор
Начнем с 494-й микросхемы. Её технические характеристики:
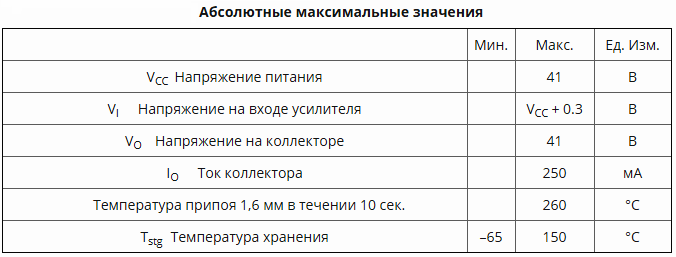
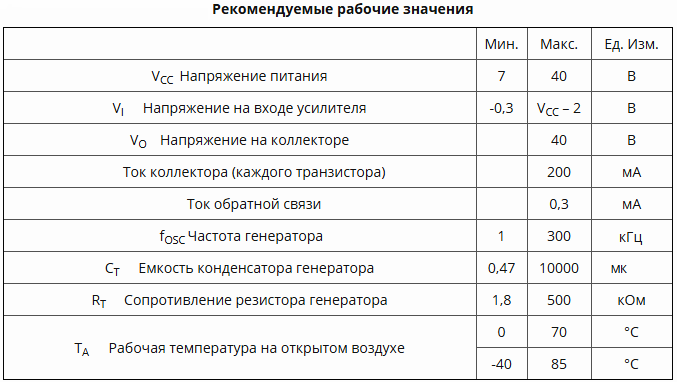
В этом конкретном примере можно видеть большинство описанных выше выводов:
1. Неинвертирующий вход первого компаратора ошибки
2. Инвертирующий вход первого компаратора ошибки
3. Вход обратной связи
4. Вход регулировки мертвого времени
5. Вывод для подключения внешнего времязадающего конденсатора
6. Вывод для подключения времязадающего резистора
7. Общий вывод микросхемы, минус питания
8. Вывод коллектора первого выходного транзистора
9. Вывод эмиттера первого выходного транзистора
10. Вывод эмиттера второго выходного транзистора
11. Вывод коллектора второго выходного транзистора
12. Вход подачи питающего напряжения
13. Вход выбора однотактного или же двухтактного режима работы микросхемы
14. Вывод встроенного источника опорного напряжения 5 вольт
15. Инвертирующий вход второго компаратора ошибки
16. Неинвертирующий вход второго компаратора ошибки
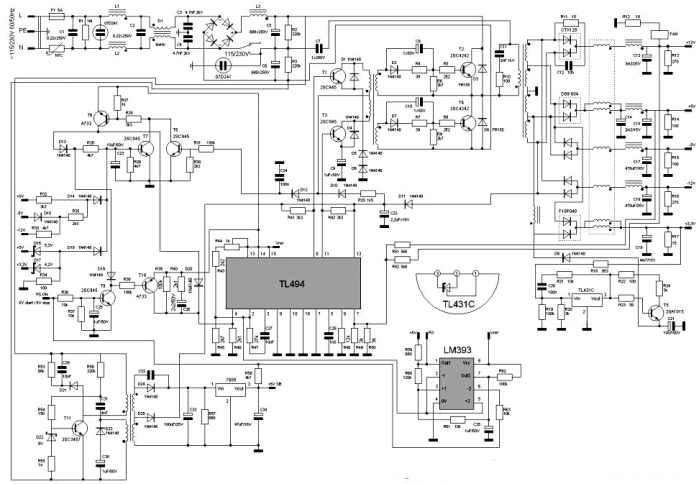
На рисунке ниже изображен пример компьютерного блока питания на этой микросхеме.
UC3843 – обзор
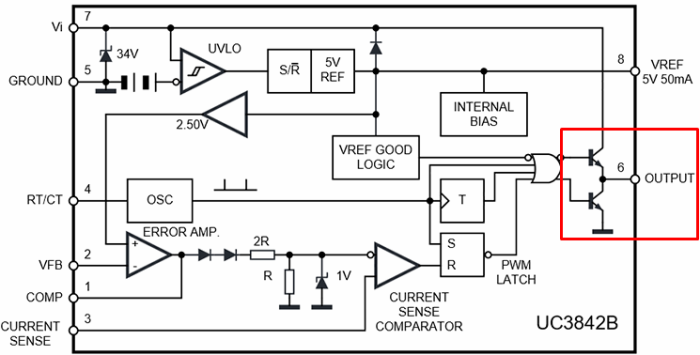
Другой популярной ШИМ является микросхема 3843 – на ней также строятся компьютерные и не только блоки питания. Её цоколевка расположена ниже, как вы можете наблюдать, у неё всего 8 выводов, но функции она выполняет те же, что и предыдущая ИМС.
Бывает UC3843 и в 14-ногом корпусе, но встречаются гораздо реже. Обратите внимание на маркировку – дополнительные выводы либо дублируются, либо незадействованы (NC).
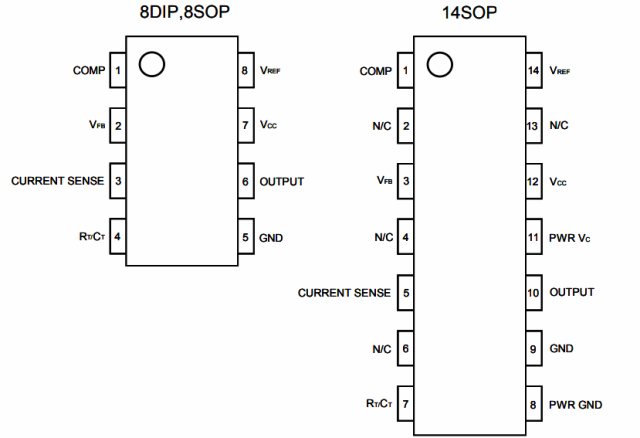
Расшифруем назначением выводов:
1. Вход компаратора (усилителя ошибки).
2. Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
3. Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
4. Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
6. Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
7. Напряжение питания микросхемы.
8. Выход источника опорного напряжения (5В, 50 мА).
Её внутренняя структура.
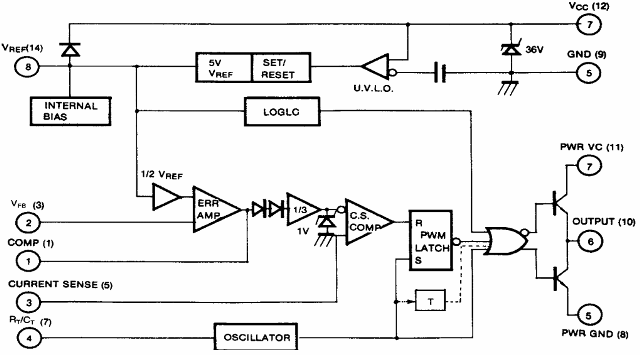
Можно убедится, что во многом похожа и на другие ШИМ-контроллеры.
Простая схема сетевого источника питания на UC3842
ШИМ со встроенным силовым ключем
ШИМ-контроллеры со встроенным силовым ключем используются как в трансформаторных импульсных блоках питания, так и в бестрансформаторных DC-DC преобразователях понижающего (Buck), повышающего (Boost) и понижающее-повышающего (Buck-Boost) типов.
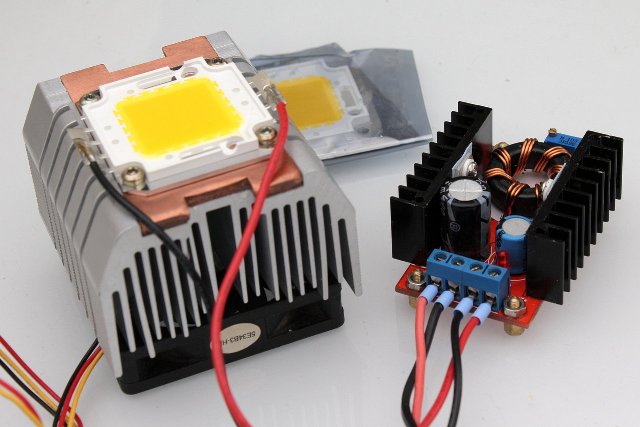
Пожалуй, одним из наиболее удачных примеров будет распространенная микросхема LM2596, на базе которого на рынке можно найти массу таких преобразователей, как изображен ниже.
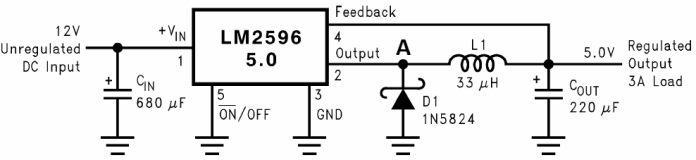
Такая микросхема содержит в себе все вышеописанные технические решения, а также вместо выходного каскада на маломощных ключах в ней встроен силовой ключ, способный выдержать ток до 3А. Ниже изображена внутренняя структура такого преобразователя.
Можно убедиться, что в сущности особых отличий от рассмотренных в ней нет.
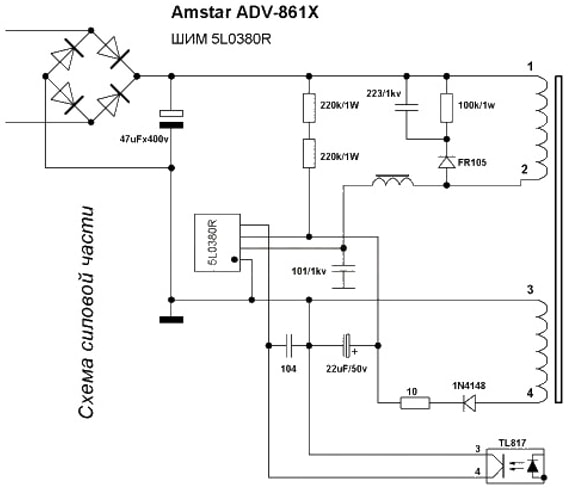
А вот пример трансформаторного блока питания для светодиодной ленты на подобном контроллере, как видите силового ключа нет, а только микросхема 5L0380R с четырьмя выводами. Отсюда следует, что в определенных задачах сложная схемотехника и гибкость TL494 просто не нужна. Это справедливо для маломощных блоков питания, где нет особых требований к шумам и помехам, а выходные пульсации можно погасить LC-фильтром. Это блок питания для светодиодных лент, ноутбуков, DVD-плееров и прочее.
Заключение
В начале статьи было сказано о том, что ШИМ-контроллер это устройство которое моделирует среднее значение напряжения за счет изменения ширина импульсов на основании сигнала с цепи обратной связи. Отмечу, что названия и классификация у каждого автора часто отличается, иногда ШИМ-контроллером называют простой ШИМ-регулятор напряжения, а описанное в этой статьей семейство электронных микросхем называют «Интегральная подсистема для импульсных стабилизированных преобразователей». От названия суть не меняется, но возникают споры и недопонимания.
Блог о электронике
 |
| Готовый девайс |
То есть у тебя на выходе ШИМ контроллера, например, сначала в течении десяти микросекунд напряжение, к примеру, двенадцать вольт, потом идет пауза. Скажем, те же десять микросекунд, когда на выходе напряжения вообще нет. Затем все повторяется, словно мы быстро-быстро включаем и выключаем рубильник.
Таким образом у нас получаются прямоугольные импульсы. Если вспомнить матан, а конкретно интегрирование, то после интегрирования этих импульсов мы получим площадь под фигурой очерченной импульсами. Таким образом, меняя ширину импульсов и пропуская их через интегратор, можно плавно менять напряжения от нуля до максимума с любым шагом и практически без потерь.
В качестве интегратора служит конденсатор, он заряжается на пике, а на паузах будет отдавать энергию в цепь. Также туда всегда последовательно ставят дроссель, который тоже служит источником энергии, только он запасает и отдает ток. Поэтому такие преобразователи при небольших габаритах легко питают мощную нагрузку и при этом почти не расходуют энергию на лишний нагрев.
Если не догнал, то я для простоты переложил это в понятное «канализационное русло» . Смотри на картинку, где ключевой транзистор ШИМ контроллера похож на вентиль , он открывает и закрывает канал. Конденсатор это банка, накапливающая энергию. Дроссель это массивная турбина, которая, будучи разогнанной потоком, при открытом вентиле, за счет своей инерции прогоняет воду по трубам и после закрытия вентиля.
Конечно, самостоятельно разработать такой источник питания сложно, требуется неслабое образование в области электроники, но не стоит напрягаться по этому поводу. Умные дядьки из Motorola, STM, Dallas и прочих Philips ’ов придумали все за нас и выпустили уже готовые микросхемы содержащие в себе ШИМ контроллер. Тебе остается его лишь припаять и добавить обвески, которая задает параметры работы, причем изобретать самому ничего не надо, в datasheet’ах подробно расписано что и как подключать, какие номиналы выбирать, а иногда даже дают готовый рисунок печатной платы. Надо лишь немного знать английский 🙂
 |
| Принцип работы импульсного БП |
 |
| Схема нашего преобразователя |
 |
| Рисунок печатной платы |
А сейчас, в порядке практического задания, под моим чутким руководством, ты построишь себе универсальный зарядник для сотового телефона , который можно будет подключать к любому источнику постоянного или переменного напряжения от 8 до 40 вольт. И неважно, что это будет, хоть бортовая сеть автомобиля, связка батареек или какой-нибудь совершенно левый блок питания от свитча или модема, лишь бы не меньше восьми и не больше сорока вольт.
Анализируем задание
Итак, по техзаданию, у нас на входе напряжение может быть как постоянным, так и переменным. А на входе DC-DC должно быть всегда постоянное. Что делать? Правильно, выпрямлять! Перечитай про выпрямители в первой части статьи и воткни на входе схемы диодный мост. Можно и без него, но тогда источники переменного тока отпадают как класс, да и тебе придется каждый раз определять полярность питающего источника, а это моветон. Поскольку после моста напряжение все равно будет пульсирующим, то повесь в параллель конденсатор. Он его немного сгладит.
Дальше ШИМ контроллер, я рекомендую широко распространенный и любимый всеми электронщиками МС34063х , где на месте «х» может быть любая буква, обычно «А». Тебе он нужен в DIP-8 корпусе, с длинными выводами который. Надеюсь, ты уже выучил все популярные типы корпусов и теперь сразу представляешь себе как он выглядит. Дальше открываем с диска даташитину и смотрим схему понижающего преобразователя, зовется она Step-Down . Подключаем ее как есть, не меняя ничего. Общий или земля у нас это традиционно минус, а плюс Vin. Выходом служит Vout в качестве плюса, а в качестве минуса все тот же общий провод. Вот тут главное не перепутать подключение к мобильнику. Поэтому посмотри тестером полярность подачи напряжения на разъем твоей мобилы.
Точный расчет – главное качество инженера!
Такс, схему мы набросали, осталось только ее сконфигурировать. Это не цифровое устройство, поэтому конфигурация тут задается установкой необходимых номиналов резисторов . Резистор Rsc я обычно заменяю на перемычку из куска провода. Его величина определяет перегрузочную способность. При перемычке преобразователь выдаст все, на что он способен, но может сгореть если от него потребовать невозможное. Наличие там резистора на 0.33 ома заставит преобразователь заглохнуть при предельной для него перегрузке, чем выше сопротивление Rsc тем при меньшей нагрузке заглохнет преобразователь. Иногда полезно, когда тебе надо ограничить максимальный выходной ток со стороны источника.
Дроссель L1 выбирается только исходя из индуктивности и перегрузочного тока. На схеме указан дроссель индуктивностью 220 микроГенри , а ток у него должен быть не меньше 500-600 миллиампер (средний ток зарядки любого современного сотового). Дроссель можно купить готовый, можно намотать самому. В принципе величина индуктивности может очень сильно варьироваться от 50 до 300 микроГенри, работать будет, но КПД возможно снизится. Главное, чтобы по току проходил, иначе будет сильно греться, а потом и вовсе сгорит.
Диод купи тот же, который и указан в схеме, благо он не редкость. Если не найдешь точно такой, то возьми любой диод Шоттки с расчетным током не меньше одного ампера. Диод Шоттки отличается от обычного диода тем, что у него дикое быстродействие. При смене направления напряжения он закрывается в порядке быстрей чем обычный, не допуская даже малейших утечек тока в обратную сторону. Через него будет замыкаться цепь катушка – конденсатор – нагрузка, когда транзистор в микросхеме закроется.
Теперь надо задать выходное напряжение . Для этого тебе надо взять тестер и померить сколько вольт выдает твой зарядник для сотового. У меня все зарядники выдают примерно по 7 вольт. Порывшись в даташите нахожу формулу зависимости выходного напряжения от резисторов R1 и R2
Для Step-Down схемы выглядит она так: Vout=1.25(1+R2/R1). Чтобы получить напряжение в 7 вольт сопротивление R2 должно быть 4.7 кОм, а R1 должен быть равен 1 кОм. Получим 7.125 вольта, но это не страшно, невелика погрешность и эти излишки все равно упадут где-нибудь на потерях в проводах. Собственно вот и все, вот мы и разработали с тобой универсальный преобразователь для своих девайсов. Теперь осталось только протравить плату и спаять.
Главное НИ В КОЕМ СЛУЧАЕ НЕ СОВАТЬ этот зарядник в РОЗЕТКУ, т.к. там напряжение 220 вольт, а наша схема расчитана на 40 вольт максимум!
Именно два таких преобразователя на 3.3 и на 5 вольт стоят в силовом блоке моего робота.
Кстати, если покопаешься в даташите, то найдешь там и повышающую схему, зовется Step-Up .
Если выкинуть нафиг диодный мост (за ненужностью) и собрать всю конструкцию по Step-Up схеме, то ты сможешь заряжать сотовый телефон от трех, а то и двух пальчиковых батареек, если хватит трех вольт для раскачки микросхемы. Также тебе никто не мешает порыться в инете и найти DC-DC преобразователь, работающий от 1, а то и от 0.5 вольт и сделать на нем повышающий преобразователь.
