§6. Законы сохранения в механике
6.6 Потенциальная энергия деформированной пружины.
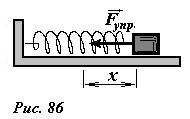
Деформированная (например, растянутая) пружина способна совершить работу. Действительно, если к растянутой пружине прикрепить некоторое тело, то пружина будет действовать на него с некоторой силой, под действием которой тело начнет смещаться, следовательно, будет совершена работа (рис. 86).
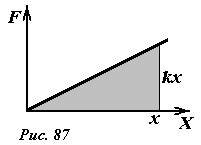
Сила, с которой пружина действует на тело, не является постоянной, поэтому для вычисления работы воспользуемся графическим методом. Построим график зависимости силы упругости F = kx от координаты, который является прямой линией (рис. 87). Площадь выделенного треугольника под графиком равна максимальной работе, которую может совершить пружина, понятно, что она равна
A = frac<1> <2>kx cdot x = frac<2>) . (1)
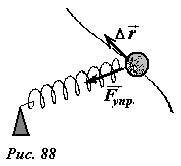
Для того чтобы пружине приписать потенциальную энергию, равную максимальной работе (1) необходимо показать, что эта работа не зависит от траектории движения тела. Чтобы доказать это утверждение, достаточно рассмотреть работу на малом участке перемещения (
Delta vec r) при движении по произвольной траектории (рис. 88). В данном случае эта работа (
delta A = vec F cdot Delta vec r = kx cdot Delta r cos alpha = kx cdot Delta x) , полностью определяется изменением деформации пружины x, поэтому она не зависит от траектории движения тела.
Таким образом, силы упругости, подчиняющиеся закону Гука, являются потенциальными, и потенциальная энергия деформированной пружины определяется формулой
Нулевой уровень потенциальной энергии, рассчитываемой по формуле (2), соответствует недеформированной пружине.
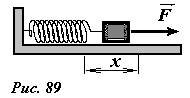
Подсчитаем, какую минимальную работу следует совершить, чтобы пружину, жесткостью k, растянуть на величину x (рис. 89). Чтобы деформировать пружину, к ней необходимо приложить внешнюю силу. Очевидно, что эта работа будет минимальная в том случае, когда внешняя приложенная сила в любой точке равна силе упругости, действующей со стороны пружины, поэтому работа этой силы будет равна (
A = frac<2>) , то есть увеличению потенциальной энергии пружины.
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остаётся растянутой. Как ведёт себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вниз к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
| Потенциальная энергия |
пружины
груза
груза в поле тяжести
В положении равновесия скорость груза максимальна. Поэтому при движении вниз к положению равновесия, скорость груза увеличивается, а значит, увеличивается и кинетическая энергия.
Для вертикального маятника важно различать потенциальную энергию груза ( ) и потенциальную энергию пружины
) и потенциальную энергию пружины  Первая определяется изменением вертикальной координаты груза, вторая — деформацией пружины. При этом, поскольку в положении равновесия пружина растянута силой тяжести, действующей на груз, значение потенциальной энергии пружины в этом состоянии не обращается в нуль. Ясно, что при движении вниз, потенциальная энергия груза уменьшается. Пружина же, по условию, все время остается растянутой. Следовательно, когда груз двигается вниз, ее деформация увеличивается, а значит, увеличивается и потенциальная энергия пружины.
Первая определяется изменением вертикальной координаты груза, вторая — деформацией пружины. При этом, поскольку в положении равновесия пружина растянута силой тяжести, действующей на груз, значение потенциальной энергии пружины в этом состоянии не обращается в нуль. Ясно, что при движении вниз, потенциальная энергия груза уменьшается. Пружина же, по условию, все время остается растянутой. Следовательно, когда груз двигается вниз, ее деформация увеличивается, а значит, увеличивается и потенциальная энергия пружины.
При определении потенциальной энергии пружины нужно обратить внимание на тот факт, что она всё время растянута, и в положении равновесия потенциальная энергия пружины не равна нулю.
Существует еще один вид потенциальной энергии, связанный с упругим взаимодействием молекул при небольших деформациях почти всех тел. Для наглядности рассмотрим сжатую пружину (рис. 9.4, а), которую мы возвращаем в исходное (недеформированное) состояние (рис. 9.4, б), придерживая рукой. При этом на руку действует сила упругости, совершающая работу. Выберем в качестве уровня отсчета положение, в котором пружина не деформирована (б). Тогда, согласно определению, совершенная силой упругости работа равна потенциальной энергии деформированной пружины. Вычислим ее величину.

Рис. 9.4.Потенциальная энергия пружины: а) сжатая пружина, б) пружина в исходном состоянии
В соответствии с законом Гука сила упругости, действующая на руку, пропорциональна величине деформации (х) и направлена в сторону уменьшения деформации Fy = —kx. Пусть пружина, распрямляясь, переместила руку на небольшой отрезок dx. Тогда она совершила работу
Полная работа вычисляется с помощью определенного интеграла:

Потенциальная энергия деформированной пружины определяется такой же формулой:

где k — жесткость пружины; х — ее деформация.
Из приведенных примеров видно, что энергию можно накопить в форме потенциальной энергии (поднять тело, сжать пружину) для последующего использования. Кроме того, следует заметить, что, если для кинетической энергии тела (частицы) существует единое универсальное выражение, то для потенциальной энергии такого выражения нет; аналитический вид формул для вычисления потенциальной энергии зависит от рассматриваемых сил. Потенциальная энергия всегда связана с той или иной силой, действующей со стороны одного тела на другое. Например, Земля силой тяжести действует на падающий предмет, сжатая пружина — на шарик, натянутая тетива — на стрелу. Потенциальная энергия это не то, что присуще самому телу: она всегда связана со взаимодействием тел.
Потенциальная энергия — это энергия, которой обладает тело благодаря своему положению по отношению к другим телам, или благодаря взаимному расположению частей одного тела.
Рассмотрим случай, когда в процессе движения тела работу совершают только консервативные силы. Тогда можно записать:
Таким образом, в данном случае сумма кинетической и потенциальной энергий тела осталась неизменной. Эта сумма называется полной механической энергией тела.
Полной механической энергиейтела называется сумма его потенциальной и кинетической энергий:
Мы получили закон сохранения механической энергии.
Если в системе действуют только консервативные силы, то полная механическая энергия входящих в систему тел не изменяется: Е = const.
Иными словами, для любых двух моментов времени полные механические энергии одинаковы:
Закон сохранения энергии в механике имеет ограниченный характер. Он не утверждает, что механическая энергия всегда
сохраняется, а лишь указывает условие, при котором такое сохранение имеет место: работу должны совершать только консервативные силы. В этом случае при движении тела происходит переход кинетической энергии в потенциальную или наоборот.
Если при движении на тело действуют не консервативные силы, которые совершают работу, то полная механическая энергия не сохраняется. В этом случае ее изменение равно этой работе:

1) Падение камня
Тело падает на землю с высоты ho без начальной скорости, а силой сопротивления воздуха можно пренебречь (рис. 9.5). На тело действует только сила тяжести, которая является консервативной. Следовательно, полная механическая энергия сохраняется.

Рис. 9.5.При падении тела его потенциальная энергия переходит в кинетическую
Запишем закон сохранения энергии для двух положений: начального (1) и конечного (2) — тело подлетело к земле:
В исходном положении скорость движения равна нулю и тело обладает только потенциальной энергией: El = mghQ. При падении камня потенциальная энергия уменьшается, но увеличивается его кинетическая энергия. В конечной точке траектории высота равна нулю, скорость движения максимальна (ук) и тело обладает только кинетической энергией .

Подставив эти значения в закон сохранения, получим:

В промежуточных точках траектории тело обладает и кинетической, и потенциальной энергиями, сумма которых остается постоянной:

2) Движение велосипедиста по холмистой местности
Пусть велосипедист начинает скатываться с вершины холма и, пройдя ложбину, поднимается по инерции на соседний холм (рис. 9.6). Допустим, что сопротивлением воздуха и трением качения можно пренебречь. Тогда на велосипедиста действуют две силы: консервативная сила тяжести (mg) и сила нормального давления со стороны дороги (N). Последняя сила перпендикулярна направлению движения и работы не совершает. Поэтому полная механическая энергия велосипедиста сохраняется: Ек + Еn. = const.
При спуске с холма потенциальная энергия переходит в кинетическую, которая достигает максимума у подножия холма. Далее велосипедист начинает вкатываться на другой холм. При этом кинетическая энергия переходит в потенциальную.
Если высота второго холма меньше высоты первого, то при подъеме на его вершину велосипедист израсходует не всю кинетическую энергию. Поэтому он минует вершину и скатится с противоположного склона второго холма.

Рис. 9.6.Велосипедист, съезжающий с холма
Если высота второго холма больше высоты первого, то велосипедист израсходует всю кинетическую энергию, не достигнув вершины, и остановится. Это произойдет на высоте, равной первоначальной. Для того, чтобы перевалить через вершину, велосипедист должен увеличить механическую энергию за счет работы ног.
В реальном случае велосипедист испытывает действие силы трения, которая совершает отрицательную работу. Поэтому, если велосипедист не работает ногами, полная механическая энергия сохраняться не будет:
Для того, чтобы поддерживать механическую энергию неизменной, велосипедист должен компенсировать отрицательную работу силы трения положительной работой своих мышц
A мышц = A трения. (9.9)
Отсюда следует, что, чем меньше сила трения, тем меньшая работа требуется от мышц, тем меньше утомление и выше результаты. Поэтому фирмы, занимающиеся производством спортивной техники и спортивной одежды, ведут постоянные исследования, направленные на уменьшение силы трения.
В некоторых случаях механическая энергия сохраняется при передаче энергии от одного тела к другому. Например, потенциальная энергия, запасенная в натянутой тетиве лука, преобразуется в кинетическую энергию стрелы.
